为了增加触觉感知灵敏度和手抓力反馈,帕西尼感知科技在DexH13双手上,搭载了近2000颗自研生产的高精度触觉传感器PX-6AX GEN2,能在超高分辨力下进行压感、摩擦、软硬质地等15种多维触觉感知,达到全量程0.01N高精度测量;并提供精细温度补仪,除三维、六维力外,还能对材质、温度多维物理信息触觉感知。
而在视觉方面,DexH13双手集成了有800万高清AI手眼相机,基于先进的零样本位姿估计视觉算法,搭配上TORA-ONE的5个摄像头和2个深度摄像头,能够识别和抓取物体六维位姿,适应多种复杂环境和任务。
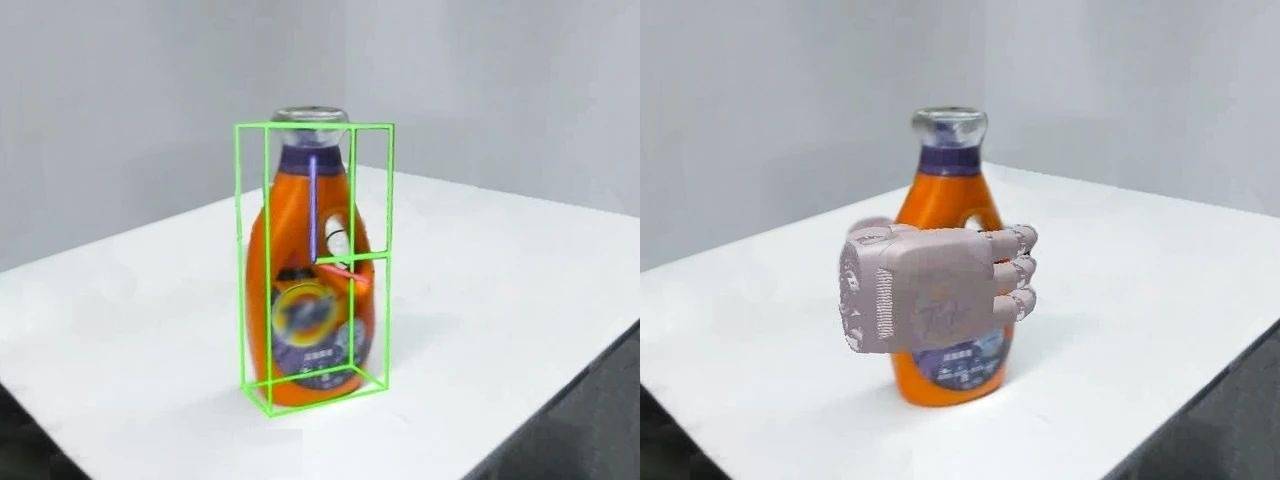
基于VTLA多模态感知模型进行物体位姿及抓取姿态估计,并评估精确抓握点
在TORA-ONE整机的下肢方面,其底盘和躯干采用了高度模块化结构设计稳定性强,腰部的折叠设计能进行灵活伸展,身高区间在1.46米至1.86米,以适应于工业制造、医疗康养、仓储物流等多种立体空间高度的作业需求。
它配备了高运动性通用移动底盘,可进行360度全向移动能力,即使是复杂的车间布局或动态工作环境中,也能完成自适应快速移动,最大速度可达 1m/s,续航时长达8小时,为工业生产高强度连续作业提供可靠、稳定的动力支撑。
同时TORA-ONE的移动底盘还配备了激光雷达SLAM定位导航系统,能够在复杂的三维环境中精确定位,准确识别各种物体和位置信息,迅速规划最优行动路径,精准避障,极大地提高生产效率和操作稳定性。

跨场景高效作业
今天,尽管传统的大型工业自动化设备在一定程度上提升了生产效率,但由于缺乏对复杂场景的认知能力,应用空间局限,多用于解决特定简单任务,难以迅速灵活应对精巧复杂的手工产品及复杂多变的生产需求。
趋于复杂及高度定制化需求的产品大幅增加,灵活且精准的响应批量定制订单是关键所在。
以工业场景为例,在精装配送环节,TORA-ONE基于触觉传感器和视触觉多模态感知模型,可以快速感知并判断出零部件的形状、尺寸和材质等信息,而后用灵巧手完成精密配件的组装工作,并将其运输到指定地点。
其采用先进的运动学建模与控制算法,可完成高自由度运动下稳定且高精度作业能力,并与周边设备及环境进行安全、高效的交互,灵活适配各类工件的柔性抓取、装配及上下料等操作。
随着TORA-ONE智能化水平和运动机能的提升,最终实现从单一基础劳动,进入到更复杂的柔性任务中去。

深度学习,持续优化




